When I was offered to write a bachelor thesis on the topic of CAN bus message mapping, I had no idea how crucial and fascinating such an area actually is and I would like to share with you what I learned and created during the past six months.
First thing first, what exactly is that CAN bus we are talking about? CAN stands for Controller Area Network, a communication protocol usually used in real-time systems to enable data exchange between each controller and electrical devices (engine sensors, brake systems, air conditioning, etc.). We can find it in many industrial domains but most importantly – transportation. CAN bus is a communication backbone of your vehicle’s internal systems and its importance has risen since every new car model is equipped with more electrical controllers and sensors than the previous one. For instance, CAN provides an efficient and cheap way to send data from engine sensors to the automobile dashboard to show you information about the car’s speed or RPM. However, the protocol only tells how each unit should talk to the other, but does not specify the “language” they ought to use. In other words, there are no general rules imposed on the data payload format. What is more, only car manufacturers are in charge of creating the definitions, which are not publicly available. As a result, we cannot simply connect to the bus and send messages or understand what exactly happens in the car. Such a state provides a certain level of security, that can prevent others from modifying the car internals or injecting malicious messages to its CAN network unless they are given some message definitions. This principle is also known as a “security by obscurity” and is generally considered as an insufficient method for securing any system or application.
Therefore, things can go wrong really easily. Lack of encryption or authentication allows us to forge any message we want and send it to the bus. Let’s say we have the format of the message carrying data from a proximity sensor and the car model uses a really advanced driving assistant, which can automatically detect if you are getting too close behind another car and slow down the car to avoid a possible crash. Now, what could happen when made up data were sent to the bus? With the right data, the driving assistant might slow down the car even if there is no vehicle around and vice-versa. In addition, CAN protocol is susceptible to DoS attacks as there is no mechanism preventing an attacker from flooding the bus with messages. As a result, blocking the whole bus can inflict major damage to the car and put the passengers in danger. Scenarios like these illustrate how easily we can affect the behavior of the car only with access to the CAN bus and why is car security more important than ever. Moreover, the next question is how do we obtain the message definitions for a specific car model.
Finally, this is where message mapping plays a key role. Luckily for us, raw CAN messages are not as random as they appear and we can find some certain patterns and characteristics to help us decode them. The process of assigning an unknown CAN message to a specific function or meaning is what we call message mapping. A few academic researchers have proposed solutions to either classify the messages or detect signals and their parameters, which do not fully recognize what exactly the message represents. Unfortunately, there is no universal method yet to map messages only with a message log from the bus and some level of interaction with the car is still required. Finding a message related to opening the door can be divided into three steps:
- Find out which messages are sent to the bus when you physically open the door.
- If there is more than one, look at the payload and discover how does it change when you close or open the door.
- Try to describe every possible state or value that is sent in the message.
It does not sound like big of a deal, right? Sadly, the task is a little bit more complicated than that. First of all, accessing the CAN bus itself could be a quite challenging task, because not all cars have their bus exposed to the OBD-II port. For instance, Volkswagen has its CAN bus hidden behind a gateway, therefore another channel needs to be found instead of a direct connection via OBD-II. In that case, you will have to take a more creative approach, which will require taking your car apart a little bit. Some modern cars may even offer ways to gain remote access, but that is way harder to accomplish still. Secondly, there are hundreds of messages sent to the bus every second and without any dedicated software, it would be impossible for us to navigate through all of that. Finally, this is where our tool comes in handy! CANdy can assort and filter out messages and provide useful information for mapping. It also gives you a better idea of what is going on the bus with its plotting modules and a decoder. What is more, you can write your own modules using its API to add some custom functionality. To better illustrate how CANdy works we would rather show you an example of mapping the gas pedal message using our tool.
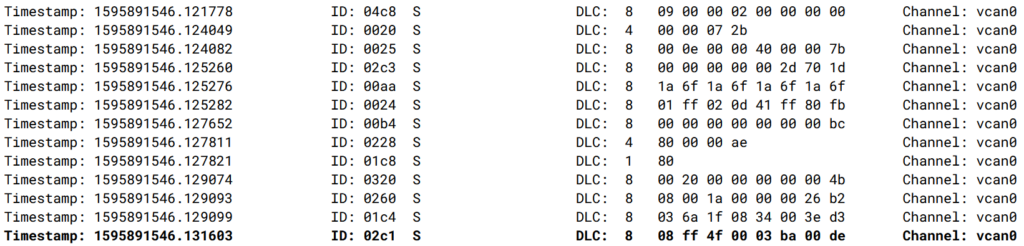

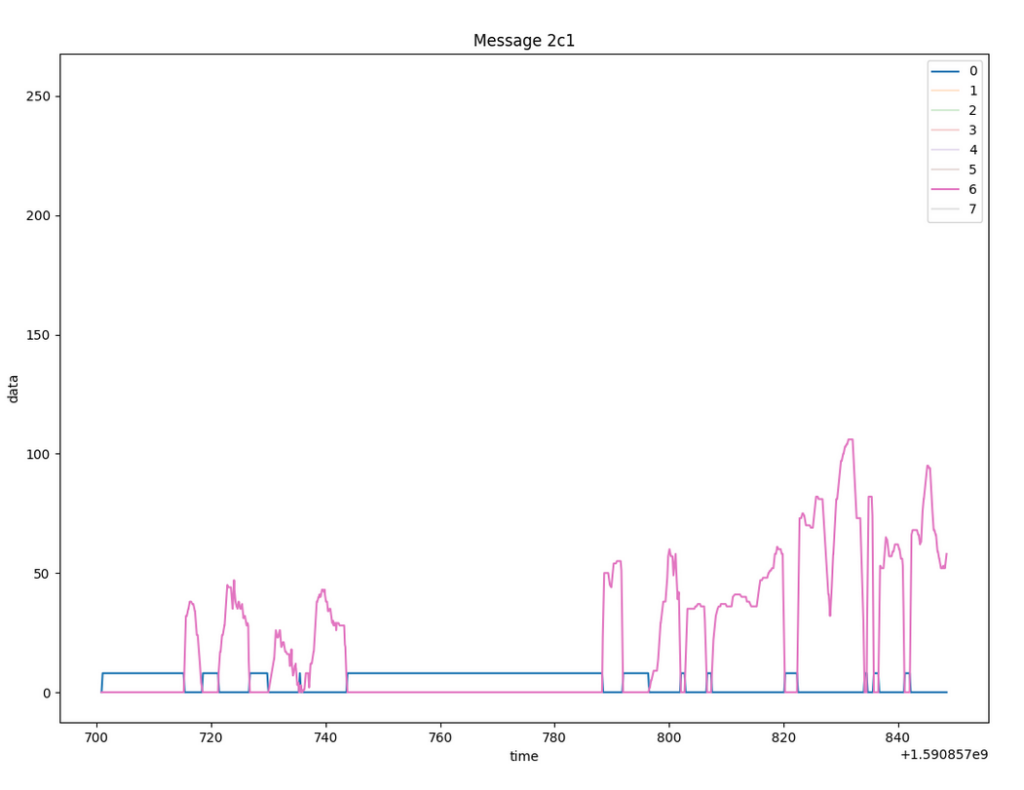
This plot only shows the first and the seventh byte in the payload. But it is sufficient to recognize the data in the first byte as an indicator whether the pedal is pressed or not, while the seventh byte seems to tell us how much. In order to confirm or dispute our theory, one may look up an official definition for the gas pedal message on the internet or compare your results with someone else. One definition we found on the internet for Toyota Corolla 2017, a very similar model to Auris, describes the message like so:

It is not necessary to dive into details about the format, so we will interpret it for you. The message ID for the gas pedal is 705, which is 2c1 in hexadecimal. Then, there are two signals, which are technically just some values placed in the specified position of the payload. Also, the CAN message data field has a fixed length of 64 bits using zero-based indexing. In this case, it means that the fourth bit in the message indicates the gas pedal is released and the last byte of the payload is used for pressure on the pedal (offset 55 bits, length 8 bits). As we can see, our first guess about the indicator was most probably correct. The latter may be still applicable, because we do not have completely matching CAN definitions, but we cannot be sure either. Another way to test this theory is to try to press the pedal and see which bytes are changing accordingly. Such a task could be carried out with another module we wrote for rendering a real-time plot for a particular message and its bytes.
Ultimately, there are a lot of other units to map with their messages like windows, turn signals, etc. And there is nothing stopping you from trying to hack your car’s CAN bus the same way as we did. CANdy is published as an open-source tool for everyone to try out and for the next step, we would like to gather and publish a crowdsourced database of various CAN definitions. Thus, you are more than welcomed to take a look at CANdy, test it out, and share your results with us. For more information, please check out the paper with technical details and resources. Also, the repository with the tool is available at this link.